
01 жовтня 2015 року
м. Київ
В рамках міжнародного проекту Тempus № 544091-TEMPUS-1-2013-1-BE-TEMPUS-JPCR «Development of Embedded System Courses with implementation of Innovative Virtual approaches for integration of Research, Education and Production in UA, GE, AM» [DesIRE] Київський університет імені Бориса Грінченка отримав навчальну віддалену лабораторію GOLDi, призначену для вивчення основ електроніки, електротехніки та проектування систем керування, для лабораторії з вбудованих систем, вартістю 279 052,72 грн.
До складу навчальної лабораторії входять:
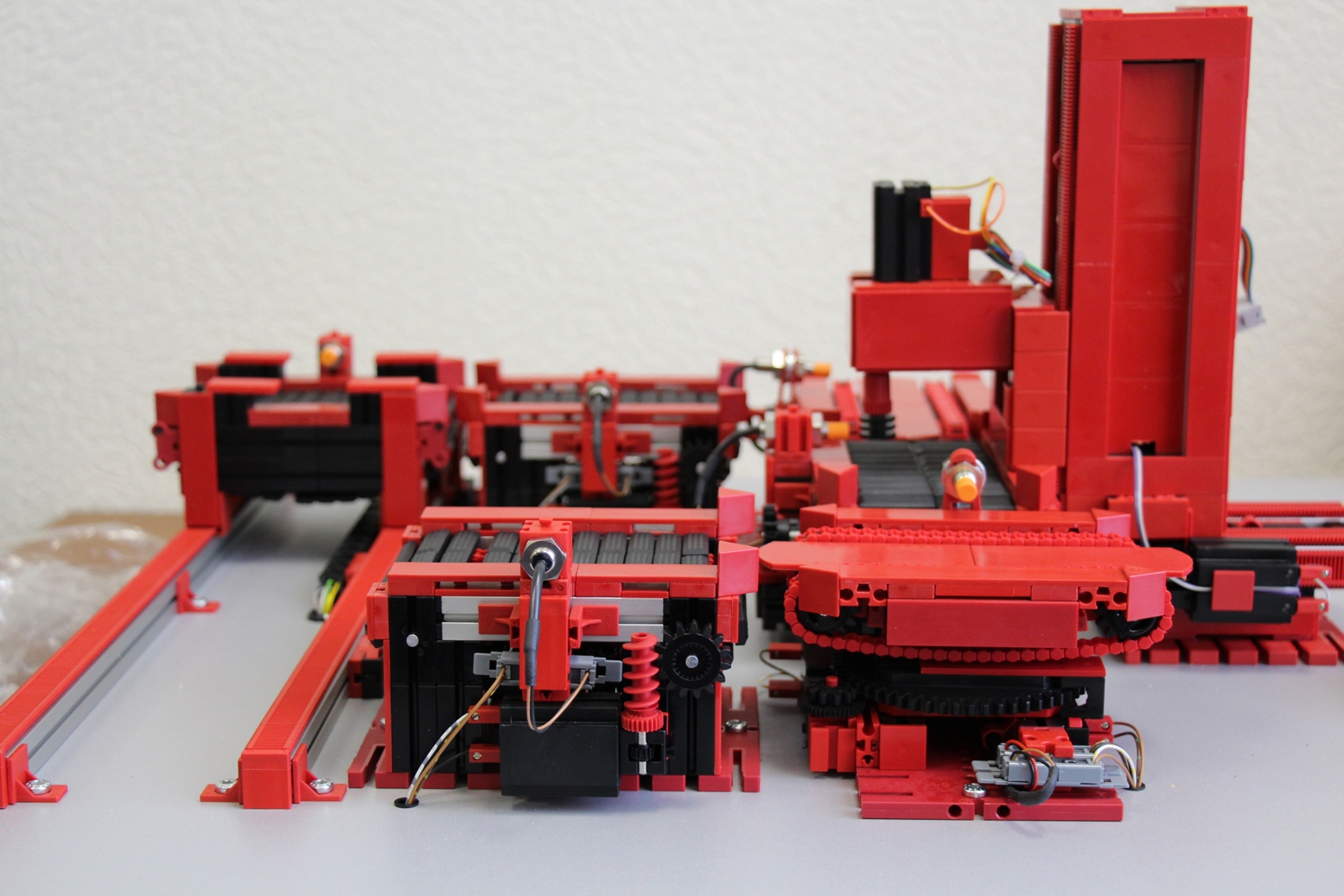
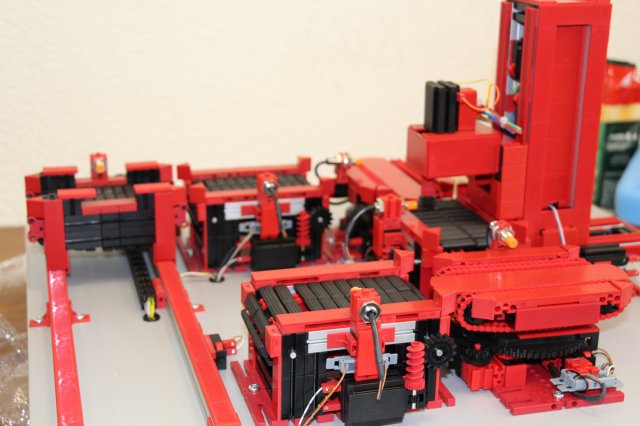
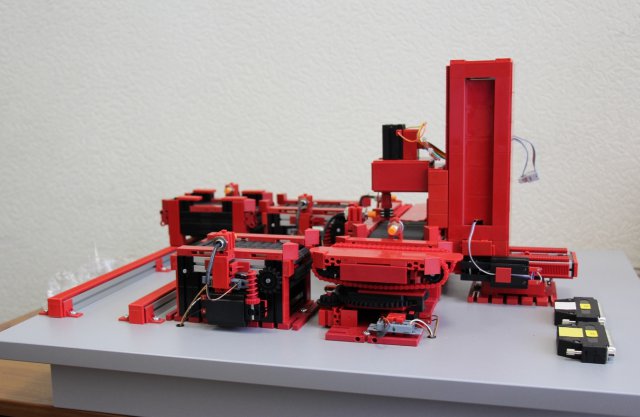
- модель 3-х поверхового ліфта (GOLDi remote lab: Elevator), яка складається з інтерфейсів GOLDi, а саме пристрою захисту шини, пристрою захисту фізичної моделі, мікроконтролера, fpga (плісе), веб-камери, фізичної моделі ліфта;
- плата для швидкого прототипування (GOLDi remote lab: Digital Demo Board), призначеної для навчання програмуванню, яка складається з інтерфейсів GOLDi, fpga (плісе), веб-камери;
- інфраструктура лабораторії Голді (GOLDi lab infrastructure).
Отримане обладнання розміщено в університетській лабораторії віддалених систем, що знаходиться в навчальному корпусі №1.
GOLDi системи призначені для демонстрації нових шляхів і можливостей дистанційного керування та віддаленого спостереження реальних процесів (наприклад, в галузі управління техніки, робототехніки) з інтегрованим у них інтерактивним використанням сучасних інтернет і інтранет технологій (HTML5, JQuery, JavaScript і т.д.). Система дозволяє з'єднувати онлайн лабораторії і обмінюватися віддаленими експериментами лабораторії з різними університетами світу.
Детальніше ознайомитись із призначенням та використанням отриманого обладнання можна на сайті GOLDi лабораторій.
Обладнання буде використовуватись в межах вивчення дисциплін «Програмування», «Фізичні процеси в обчислювальних системах», «Технології проектування вбудованих комп’ютерних систем» та ін. на деяких етапах процесу проектування вбудованих систем. А також для проектної діяльності студентів, задачею котрої може бути, наприклад, розробка алгоритму для системи керування однією із різних фізичних систем (електромеханічною моделлю ліфта, виробничою секцією).











 Безбар’єрність
Безбар’єрність



")
